
About me
I’m a M.S. stundent of LIESMARS, Wuhan University, supervised by Prof. Bijun Li and Jian Zhou. Previously, I received my B.Eng. from SGG of Wuhan University. My interest mainly focus on autonomous driving perception system, including 2D/3D object detection, BEV segmantic segmentation, online HD map construction, topology reasoning, occupancy network and so on. Free feel to contact me via yxhuang@whu.edu.cn .
News
- [2023/11] 🎂 I built this personal website.
- [2023/10] 🎓 I received the Graduate National Scholarship, 2022-2023.
- [2023/07] 🥈 We won the 2nd place of Autonomous Driving Challenge——OpenLane Topology in CVPR 2023 workshop. We published a technical report named Separated RoadTopoFormer to introduce our solution.
- [2023/06] 📄 MENet, a LiDAR detection method enhanced by HD map, was published in JAG(IF:7.5)
- [2023/03] 💼 I went to AMD for an internship, working on the R&D of AI algorithms.
- [2022/09] 🥇 We won the 1st place of Intelligent Unmanned System Application Challenge in ICAUS 2022.
- [2022/07] 📄 Camera-LiDAR Fusion for Object Detection, Tracking and Prediction was published in Geomatics and Information Science of Wuhan University
- [2022/05] 📄 Roll-Sensitive Online Camera Orientation Determination On The Structured Road, a camera calibration algorithm based on the vanish point, was published in ISPRS Congress 2022.
- [2021/03] 💼 I went to ArchDrive for an internship, working on lane detection and lane keeping.
Education

Wuhan University (WHU)
September 2021 - Present
Major: M.S. in Photogrammetry and Remote Sensing
Hornor: National Scholarship 2023
Wuhan University (WHU)
September 2017 - July 2021
Major: B.E. in Surveying and Mapping Engineering
Hornor: Excellent undergraduate graduates
Experience
AMD
March 2023 - October 2023
Position: Research Intern
Focus: Road Topology Reasoning, Model Pruning, Occupancy Network

ArchDrive
March 2021 - June 2021
Position: Intern, Perception Algorithm
Focus: Lane Detection, Lane Keeping
Publications
* denotes equal contributions and † denotes the corresponding author.
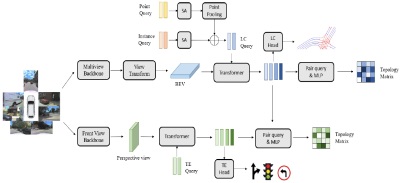
Separated RoadTopoFormer
Mingjie Lu*, Yuanxian Huang*, Ji Liu, Jinzhang Peng, Lu Tian, Ashish Sirasao
Technical Report, 2023
[Paper]
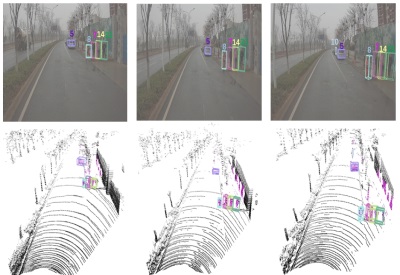
MENet: Map-enhanced 3D object detection in bird’s-eye view for LiDAR point clouds
Yuanxian Huang, Jian Zhou†, Xicheng Li, Zhen Dong, Jinsheng Xiao, Shurui Wang, Hongjuan Zhang
JAG 2023 (IF:7.5)
[Paper][Code]
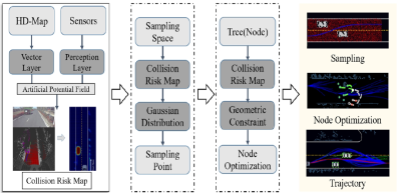
HDM-RRT: A Fast HD-Map-Guided Motion Planning Algorithm for Autonomous Driving in the Campus Environment
Xiaomin Guo, Yongxing Cao, Jian Zhou, Yuanxian Huang, Bijun Li†
Remote Sensing, 2023 (IF:5.0)
[Paper]
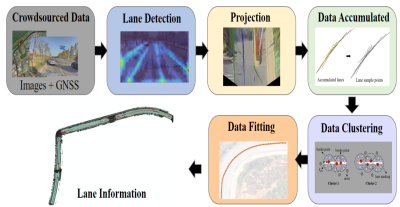
Lane Information Extraction for High Definition Maps Using Crowdsourced Data
Jian Zhou, Yuan Guo, Yaoan Bian, Yuanxian Huang, Bijun Li
IEEE Transactions on Intelligent Transportation Systems, 2022 (IF:8.5)
[Paper]
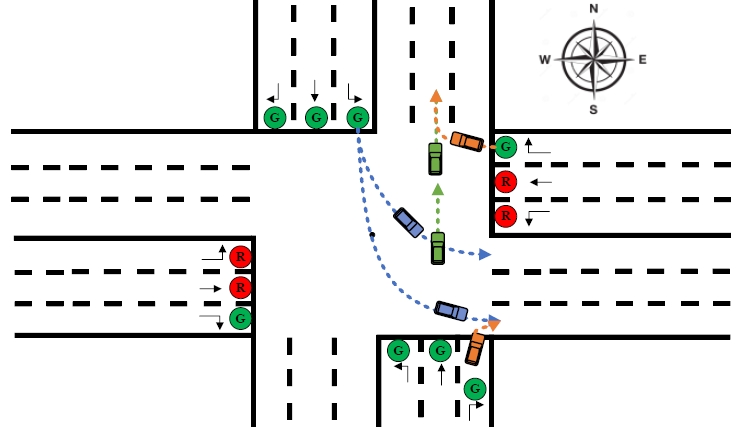
Cooperative Motion Planning with 3D Spatio-temporal Map for Connected and Automated Vehicles in Intersection
Yongxing Cao, Bijun Li, Hongjuan Zhang†, Duanfeng Chu, Yuanxian Huang, Xiaomin Guo
CVCI, 2022
[Paper]
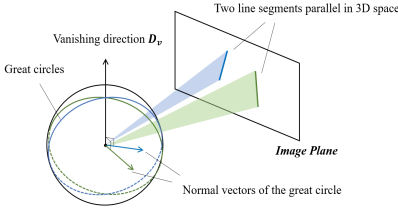
Roll-Sensitive Online Camera Orientation Determination On The Structured Road
Yuanxian Huang, Jian Zhou†, Bijun Li, Jinsheng Xiao, Yongxing Cao
ISPRS Congress, 2022
[Paper]
Camera-LiDAR Fusion for Object Detection, Tracking and Prediction
Yuanxian Huang, Bijun Li, Qi Huang, Jian Zhou†, Lanlan Wang, Jialin Zhu
Geomatics and Information Science of Wuhan University, 2022
[Paper]
Awards
- 2nd place of Autonomous Driving Challenge——OpenLane Topology, CVPR 2023
- 1st place of Intelligent Unmanned System Application Challenge, ICAUS 2022
- 2nd place (2/313) of Jiangsu Big Data Development and Application Competition - Traffic Event Detection Based on Connected Vehicle Video Data, 2020
- National Scholarship, 2022-2023